GIE Update
Last year, PG revealed our intentions to develop a networked electrification strategy for landscaping and other off-highway vehicles.
Called Intelligent Electrification, or IntElectTM, this suite of technologies combines the efficiency and versatility of electrification with the rich information stream in vehicle data and control buses.
Our early efforts in hybridization focused on the obvious: fuel efficiency and emission reduction, both increasingly important considerations.
But we soon understood that there was much more value to be had. The versatility of electrification offered significant improvement in operability, comfort and accessorization. Finally, a data bus wrapping all of the vehicle equipment together could provide data to on-site supervisors, maintenance teams, owners/ lessors, and of course landscape business owners.
That’s how IntElectTM came to be.
There are three key pieces to the IntElectTM product family. In the days preceding GIE + EXPO we’ll be revealing them in more detail. The basic functional diagram below shows where the pieces fit:
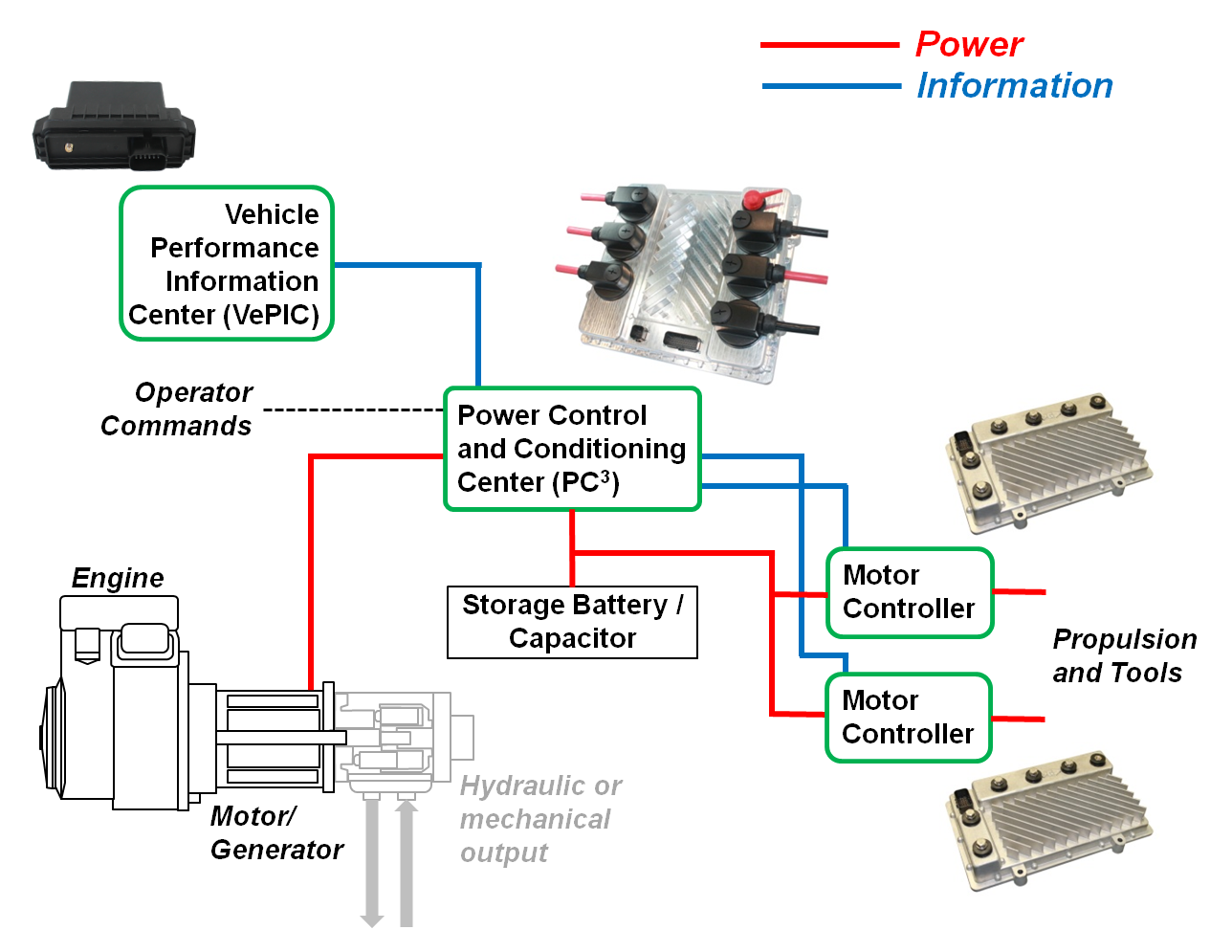
Briefly speaking they are:
Motor Controls: Our work developing a hybridized Zero-Turn Radius mower showed us that we needed a purpose-built solution. The ZTR needed a rugged controller that could handle the debris, moisture and extreme thermal and load conditions of commercial use without concern for special mounting or protection. Moreover it needed to be easy to use for a variety of motor configurations without expensive sensors. And it needed to control precisely and efficiently in very low speed (“0+” rpm), rapidly reversing, high-torque scenarios. We’ve done this in our MDC13P150 design. It’s the muscle for all machine Power functions.
Click here for the Motor Control Data Sheet
VePIC: At the other end of the system on the Information side, we’re developing the Vehicle Performance information Center, or VePIC. This compact assembly is connected to a J1939 CAN bus, and records all the operator commands and vehicle equipment performance data. It also gathers physical location and attitude information. This is communicated to mobile devices in the field, and to the cloud through 4G/5G. VePIC yields actionable information on everything from business KPI’s to operator safety behaviors to economic data to help manage teams, equipment and budgets. And it can be implemented on conventional (non-electrified) platforms as well.
Click here for the VePIC Data Sheet
PC3: The intersection of Information and Power in the IntElect system is the Power Control and Conditioning Center (PC3). It receives and processes all Operator commands, controls the engine to maintain electrical conditions, converts AC and DC power bi-directionally, and is the communications center for the J1939 bus. Capable of managing up to 20kW of electric power, the PC3 can form the core of a series or parallel hybrid system for many off-highway applications.
Click here for the IntElect PC3 Data Sheet
There’s a lot more to the story; we look forward to meeting you at GIE + EXPO 2019 to discuss how IntElectTM can work for you!
